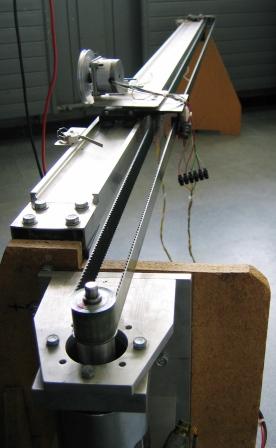
Introduction : Le système provient d'un traceur de patron par découpe au laser et a été un peu modifié … mais on retrouve comme pièces d'origines : le moteur à courant continu qui entraine un mobile selon un axe via une courroie, une dynamo-tachymétrique reliée au moteur, un codeur incrémental pour mesurer la position . Il reste à mettre en place un système de génération de trajectoire, la mesure de la position, un modèle de ce procédé, puis d'asservir la position. Au cas où … des capteurs de fin de course ont été rajoutés!
Finalité ludique du projet : positionner un mobile à la position voulue (pilotage d'un portique).
Aspects traités lors de ce travail :
Utilisation et caractérisation d'un capteur de position(codeur
incrémentale).
Contrôle de moteur à courant continu avec un amplificateur de puissance.
Mise en place d'un asservissement un axe piloté sous Labview (analyses
des performances et de leurs limites).
Matériel disponible :
maquette un axe avec MCC+ dynamo tachy + codeur incrémental + chariot +capteur de fin de course
carte de puissance incluant un LM12 (AOP de Puissance).
carte de contrôle de moteur pas à pas (L293 + L298)
capteurs de lumière divers
Alimentation de puissance.
Le moteur est alimenté par une alim de table ± 15V (prendre ±8V au début!) via un ampli op de puissance montée en amplificateur de tension (LM12) avec un gain que vous déterminerez. C'est aussi un ampli de puissance of course!
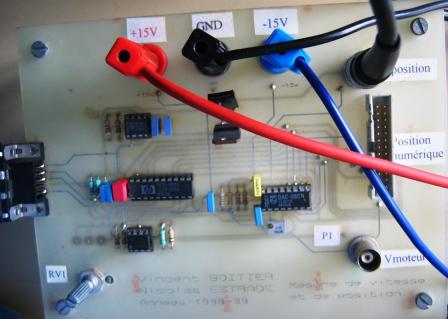
Sur la figure ci-contre, les connections sont les suivantes :
BLANC : borne + de la commande
NOIR : la masse du montage (O
volts)
VERT :sortie du montage
JAUNE : +20 V
BLEU : -20V
le moteur (fils noir et rouge) est donc reliée aux bornes noir et vert.
Si on pilote le système avec un GBF( ou une carte d'acquisition) la tension
de commande est appliquée entre blanc et noir.
L'alimentation continu de puissance est connectée sur les bornes bleu, noir,
jaune pour les potentiels respectif -15, 0, +15 Volts.
Avant de
brancher le système, régler la sortie du GBF à 0 volts pour que le moteur ne
parte pas à fond!


L'information donnée par le codeur incrémental est traitée par un circuit HCTL 2020 (sur carte annexe) qui permet de récupérer une tension analogique image de la position.
On peut aussi visualiser directement la tension aux bornes de la dynamo tachymétrique (fils blanc et bleu) pour récupérer l'image de la vitesse.
Comment faudra-t-il traiter l'information de position pour récupérer sous Labview la position exprimée en cm du chariot?